Phase 01
Hardware prototyping
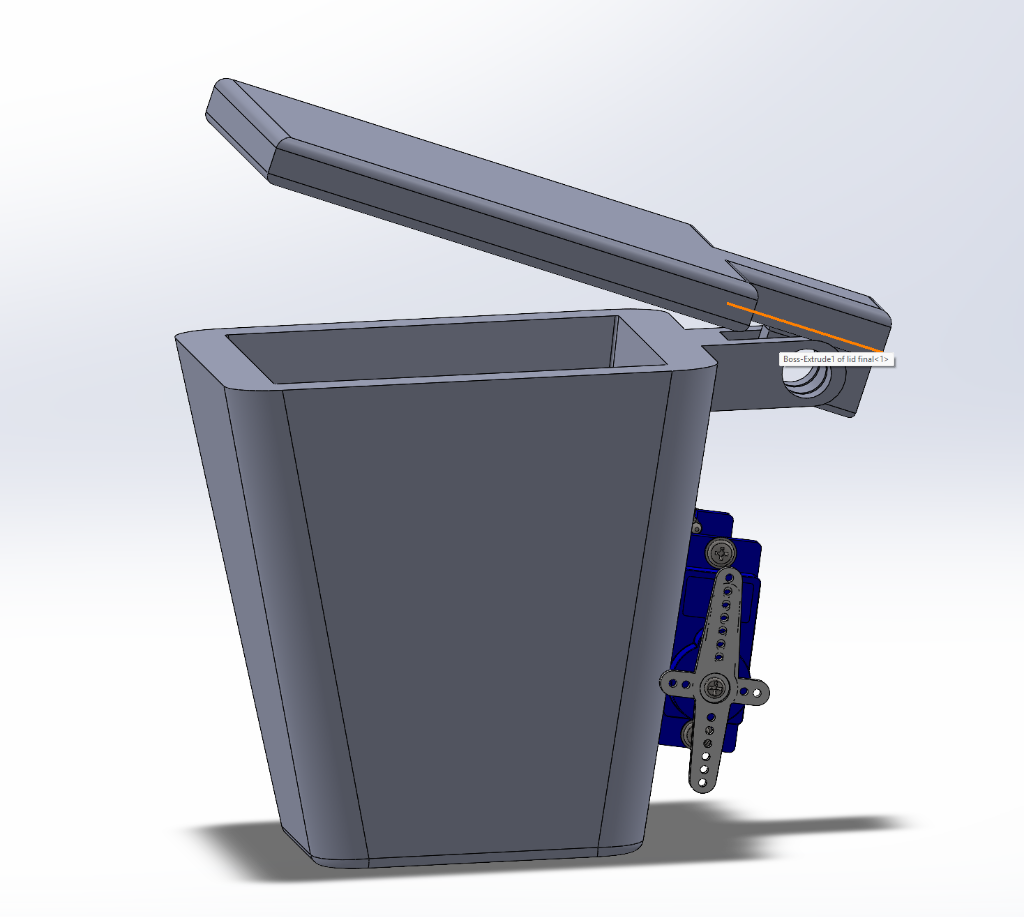
Before writing a single line of code, we designed the physical bin in SolidWorks. The goal was a compact enclosure that could house dual sorting compartments, a servo-actuated lid mechanism, and an integrated camera and sensor bay — all while remaining manufacturable on a student budget.
Design decisions
- Tapered body geometry for structural rigidity and manufacturing simplicity
- External servo mount with horn linkage for reliable lid actuation without internal interference
- Hinge point positioned to allow full 90-degree lid opening for unobstructed waste insertion
- Modular electronics bay designed to be removable for maintenance and iteration
The physical prototype went through three major iterations before arriving at the final form factor that balances structural integrity, component accessibility, and aesthetic simplicity.